李飞飞发起机器人屋工作挑战赛!老黄立即批准
栏目:成功案例 发布时间:2025-10-23 10:33
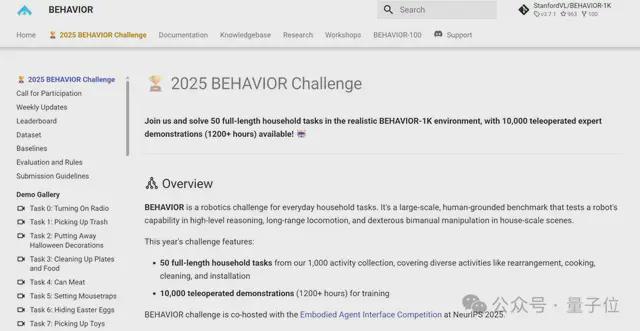 李飞飞将利用Imagenet来推广具身智能。依然是“挑战”。近日,由李飞飞团队发起、Nvidia赞助(其中之一)的首届作业挑战赛正式启动。此时,他们决心联合学院和工业界的力量,共同向机器人做家务的高基础发起进攻。简单来说,比赛需要以星海图R1 Pro(双手操作+轮胎运动)为体,以逼真的行为——1K虚拟家庭环境,解决50项完整的家务活(涵盖修理、做饭、清洁等各种活动)。比赛可以自由选择算法,官方还提供了10000条专家演示轨迹(约1200条时间),方便一切通过模仿学习快速上手。特定轨道有两种选择: 标准轨道:机器人只能根据“它所看到的”做出决定。私人赛道:机器人可以更详细的环境状态信息(如物体坐标、房间结构)。然后,官员让所有机器人在固定的 50 个任务中运行相同的测试,并使用以下标准(主要)进行评分: 任务完成率:如果任务能够彻底完成,例如“将餐具放入洗碗机”实际上已完成。部分完成:如果只完成一半任务,也会得到轻微分数,例如“柏拉图选择但没有放置”。其他辅助资源Atig包括:模拟时间(任务完成多长时间)、导航距离(走了多远)、手部运动(机械臂移动了多少次)、稳定性等。最终的排名主要取决于任务的平均完成率。竞赛提交截止日期为2025年11月15日,前三名获奖者还将获得最高1000美元的奖金和一台RTX 5080。好,说完竞赛内容,下一个问题是——为什么是启动行为?对于推出该行为背后的原因,李飞飞在与 Jim Fan(放置智能实验室的 Nvidia 联合负责人、李飞飞的学生)和 Edmar(Nvidia Omniverse 社区经理)的炉边谈话中解释道。总的来说,该行为的推出是受到imetenet的启发。 2009年,李飞飞主持的研究团队在CVPR上发表了论文《Imagenet:一个大规模分层图像数据库》。发起Imagenet挑战赛,这一成功已成为计算机视觉领域的试金石,开启了一个新时代。此时回到Imagenet,李飞飞坦言,没想到会全面恢复AI。他只是顺着自己的好奇心。在他看来,Imagenet,连同神经网络(尤其是NVIDIA的卷积神经网络)和GPU,结合起来开始深入研究。同样的方式。说到做家务的机器人,目前机器人的研究病点包括:机器人研究缺乏标准化;;;;;;;;;;;;;;;;;;;;;;;;任务的选择是共同的片段,导致论文之间的结果比较困难;并且缺乏训练数据,这有点类似于Imagenet出现之前计算机视觉面临的问题。因此,李飞飞提到了机器人领域的“北极星”使命,他希望利用社区的力量来推动具身智能的发展。行为挑战有哪些亮点?另外,除了李菲菲行为本身的气场之外,挑战本身也很有趣。首先,在理念上,行为设计以人为中心,特别强调人工智能是为了增强人、赋予人权力,而不是取代人。这个观念贯穿于行为的方方面面。例如,团队将始终确保机器人目标在任务意义、数据选择、伦理导向等方面符合人类的需求。其次,主要行为是针对作业,并首次明确提出了相关标准——真正的家庭机器人应该具备跨房间导航、双手精细控制、长期规划和动态适应等诸多能力。此外,要训练机器人确定相关能力,行为的规模也需要“大”。涵盖1000项家庭活动、50项完整长度的挑战,平均单项任务需要连续运行6.6分钟。因此,这种以人为中心、目标明确、规模巨大的行为,毫无疑问是potEnto的“下一个想象”。至于最终的结果,一切都需要抛在脑后。毕竟Imagenet不是一朝一夕就能实现的。尽管如此,如果 Imagenet 开启了视觉智能的黄金时代,那么该行为可能是第一个号角为了体现智能。而做家务的机器人这个问题,最近成为了智能项目中竞相竞争的一个工作。以后我洗澡的视频都是关于家务的。大语言模型的发现是制造问题,宝石智能机器人的发现是制造家务。趋势很明显。竞赛详情页面:https://behavous.stanford.edu/challenge/index.html
特别声明:以上内容(如有则包括照片或视频)由自媒体“网易号”平台用户上传发布。本平台仅提供信息存储服务。
注:以上内容(包括照片和视频)由Netea Sea用户上传发布,该平台为社交媒体平台,仅提供信息服务。
李飞飞将利用Imagenet来推广具身智能。依然是“挑战”。近日,由李飞飞团队发起、Nvidia赞助(其中之一)的首届作业挑战赛正式启动。此时,他们决心联合学院和工业界的力量,共同向机器人做家务的高基础发起进攻。简单来说,比赛需要以星海图R1 Pro(双手操作+轮胎运动)为体,以逼真的行为——1K虚拟家庭环境,解决50项完整的家务活(涵盖修理、做饭、清洁等各种活动)。比赛可以自由选择算法,官方还提供了10000条专家演示轨迹(约1200条时间),方便一切通过模仿学习快速上手。特定轨道有两种选择: 标准轨道:机器人只能根据“它所看到的”做出决定。私人赛道:机器人可以更详细的环境状态信息(如物体坐标、房间结构)。然后,官员让所有机器人在固定的 50 个任务中运行相同的测试,并使用以下标准(主要)进行评分: 任务完成率:如果任务能够彻底完成,例如“将餐具放入洗碗机”实际上已完成。部分完成:如果只完成一半任务,也会得到轻微分数,例如“柏拉图选择但没有放置”。其他辅助资源Atig包括:模拟时间(任务完成多长时间)、导航距离(走了多远)、手部运动(机械臂移动了多少次)、稳定性等。最终的排名主要取决于任务的平均完成率。竞赛提交截止日期为2025年11月15日,前三名获奖者还将获得最高1000美元的奖金和一台RTX 5080。好,说完竞赛内容,下一个问题是——为什么是启动行为?对于推出该行为背后的原因,李飞飞在与 Jim Fan(放置智能实验室的 Nvidia 联合负责人、李飞飞的学生)和 Edmar(Nvidia Omniverse 社区经理)的炉边谈话中解释道。总的来说,该行为的推出是受到imetenet的启发。 2009年,李飞飞主持的研究团队在CVPR上发表了论文《Imagenet:一个大规模分层图像数据库》。发起Imagenet挑战赛,这一成功已成为计算机视觉领域的试金石,开启了一个新时代。此时回到Imagenet,李飞飞坦言,没想到会全面恢复AI。他只是顺着自己的好奇心。在他看来,Imagenet,连同神经网络(尤其是NVIDIA的卷积神经网络)和GPU,结合起来开始深入研究。同样的方式。说到做家务的机器人,目前机器人的研究病点包括:机器人研究缺乏标准化;;;;;;;;;;;;;;;;;;;;;;;;任务的选择是共同的片段,导致论文之间的结果比较困难;并且缺乏训练数据,这有点类似于Imagenet出现之前计算机视觉面临的问题。因此,李飞飞提到了机器人领域的“北极星”使命,他希望利用社区的力量来推动具身智能的发展。行为挑战有哪些亮点?另外,除了李菲菲行为本身的气场之外,挑战本身也很有趣。首先,在理念上,行为设计以人为中心,特别强调人工智能是为了增强人、赋予人权力,而不是取代人。这个观念贯穿于行为的方方面面。例如,团队将始终确保机器人目标在任务意义、数据选择、伦理导向等方面符合人类的需求。其次,主要行为是针对作业,并首次明确提出了相关标准——真正的家庭机器人应该具备跨房间导航、双手精细控制、长期规划和动态适应等诸多能力。此外,要训练机器人确定相关能力,行为的规模也需要“大”。涵盖1000项家庭活动、50项完整长度的挑战,平均单项任务需要连续运行6.6分钟。因此,这种以人为中心、目标明确、规模巨大的行为,毫无疑问是potEnto的“下一个想象”。至于最终的结果,一切都需要抛在脑后。毕竟Imagenet不是一朝一夕就能实现的。尽管如此,如果 Imagenet 开启了视觉智能的黄金时代,那么该行为可能是第一个号角为了体现智能。而做家务的机器人这个问题,最近成为了智能项目中竞相竞争的一个工作。以后我洗澡的视频都是关于家务的。大语言模型的发现是制造问题,宝石智能机器人的发现是制造家务。趋势很明显。竞赛详情页面:https://behavous.stanford.edu/challenge/index.html
特别声明:以上内容(如有则包括照片或视频)由自媒体“网易号”平台用户上传发布。本平台仅提供信息存储服务。
注:以上内容(包括照片和视频)由Netea Sea用户上传发布,该平台为社交媒体平台,仅提供信息服务。 下一篇:没有了